Écrit par Raffi Jabrayan, Exyn Technologies
Comme tout opérateur sur n’importe quel chantier peut vous le dire, la poussière entre dans tout. Il décompose les pièces, gâche avec les capteurs et est toujours présent même après avoir tout essayé en votre pouvoir pour vous en débarrasser. Et maintenant, avec l’avancement de drones de cartographie 3D qui se rendent sur les chantiers de construction et autres environnements industriels, vous pouvez parier que leurs hélices accélèrent également un peu de poussière, ce qui provoque des problèmes pour les capteurs de navigation à bord.

Ou – au moins c’était l’habitude.
Robots équipés d’un Nexys peut naviguer de manière autonome dans un algorithme de slam en ligne (Vous pouvez tout lire sur le fonctionnement du slam ici). Essentiellement, si trop de particules de poussière sont ramassées à travers le slam de capteur lidar interpréteront cela comme un objet solide, ce qui fait que les robots deviennent «coincés» dans des nuages de poussière conduisant à des cycles de batterie gaspillés – ou pire, un accident.
Pendant des années, cela a été un obstacle majeur pour les plates-formes de navigation à propulsion slam. Les chercheurs ont travaillé pour aider ces plates-formes à voir «la poussière en temps réel, en comprenant ce que c’est et comment naviguer autour de lui. Cependant, lorsque vous essayez de régler les données LiDAR pour filtrer la poussière, le robot a du mal à voir des fils minces et des obstacles plus petits, qui est potentiellement catastrophique.
Exyn Technologies a maintenant développé un algorithme d’apprentissage automatique propriétaire qui peut désormais détecter avec précision les nuages de poussière en temps réel et s’adapter automatiquement pour s’assurer que la zone est cartographiée en toute sécurité et avec précision. Et ce niveau d’autonomie 4B (En savoir plus sur les niveaux d’autonomie standardisés ici) est désormais cuit dans tous les Nexys compatibles avec l’autonomie pour les opérateurs d’UAV souterrains.
Qu’est-ce qu’un filtre à poussière pour la navigation autonome?
Vous pouvez considérer un filtre à poussière comme une version logicielle des lunettes de soleil polarisées que vous pourriez porter lors d’un road trip.
Lorsque vous conduisez vers le soleil couchant, l’éblouissement peut masquer les meilleurs détails de la route devant vous. Les panneaux de signalisation et même d’autres voitures sont souvent partiellement obscurcis par l’éblouissement. Un nuage de poussière a un effet similaire sur la façon dont Slam pourrait interpréter les données LiDAR.
Dans une voiture, vous mettriez une paire de lunettes de soleil polarisées et soudain, ces détails obscurcis deviendraient visibles, vous donnant une image claire de la route à venir.
Un filtre à poussière pour un système lidar est similaire, mais au lieu d’être un objectif physique ou un filtre comme une paire de lunettes de soleil, c’est un algorithme informatique qui élimine l’éclat en permettant Exynai – L’ensemble des algorithmes de slam propriétaire qui alimentent l’autonomie et la cartographie de Nexys – pour analyser des millions de points de données lidar dans des objets réels ou simplement la poussière des particules.
Cependant, tous les filtres à poussière ne sont pas créés égaux, et le nouveau filtre à poussière Exynai a quelques astuces dans sa manche qui vous permettent de mener une cartographie numérique dans des environnements plus difficiles.
Filtrage avancé de poussière en ligne avec Nexys
Exyn a compris qu’un algorithme de filtrage de poussière en temps réel ne pouvait pas consommer une tonne de ressources de calcul – sinon elle enlèverait les missions autonomes. Il fallait fonctionner rapidement, faire naviguer avec un robot en toute confiance et, surtout, ne pouvait pas affecter la précision du nuage de points une fois capturé et traité.
Pour commencer, les «Exyneers» ont examiné des années de vols précédents dans des environnements poussiéreux et les ont alimentés dans un algorithme d’apprentissage automatique pour aider à enseigner à l’exynai à quoi ressemblait la poussière. Ces données de vol aideraient à former un modèle qui pourrait mieux détecter la poussière en temps réel.
Cette efficacité permet un filtrage de poussière en temps réel lors de l’exploration autonome des mines et d’autres environnements dangereux qui poseraient des problèmes de sécurité et de précision importants avec d’autres systèmes de filtrage de poussière moins capables.
Comment fonctionne le filtre à poussière exynai
Le filtre à poussière Exynai fonctionne en trois phases pour le rendre ultra-efficace tout en fournissant la précision nécessaire à l’exploration autonome dans des environnements difficiles.
- Première étape: Comme Exynai ingère des données LiDAR pendant le vol, il identifie largement des points qui pourraient être de la poussière basés sur des mesures simples. Il s’agit d’une approche assez standard pour d’autres systèmes de navigation. Et comme le robot navigue sur de nouveaux environnements, les chercheurs peuvent régler cette étape de filtre pour mieux détecter la poussière dans de nouveaux environnements, mais en fin de compte, vous filtrez toujours trop pour que le robot puisse naviguer en toute sécurité.
À ce stade, le robot sait à quoi pourrait ressembler une particule de poussière, mais il ne sait pas à quoi pourrait ressembler la forme d’un nuage de poussière. Et c’est là que la deuxième étape entre en jeu.
- Deuxième étape: Vous pouvez penser à ces étapes comme le sable de tamisage à travers un écran. La première étape était large et tirée dans de nombreuses particules de poussière potentielles, maintenant à l’étape deux, les données en temps réel sont alimentées par un modèle d’apprentissage automatique développé par Exyn pour montrer au robot à quoi ressemble la «forme» de la poussière.
Il s’agit de l’étape cruciale, car sans cette «forme», Exynai filtrerait des fils minces ou d’autres petites fonctionnalités qui pourraient provoquer un crash ou le robot coincé. Il s’agit d’un obstacle historique pour les plates-formes SLAM à base de lidar fonctionnant de manière autonome dans des environnements poussiéreux.
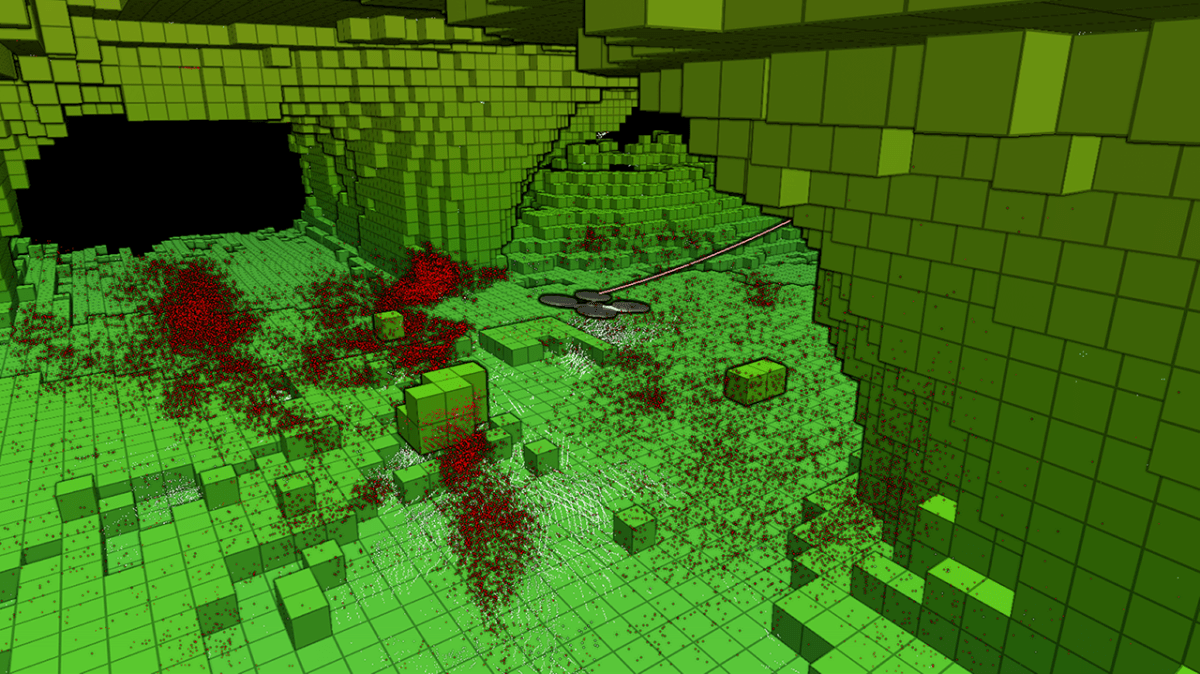
- Troisième étape: La dernière étape du processus de filtrage est de savoir comment le robot est capable de faire tout cet immense calcul alors qu’au milieu d’un vol autonome. Pendant son envol, Exynai prend des données de nuages de points et l’interprète via un pipeline de mappage d’occupation. Cela convertit un groupe de points en une boîte 3D, ou voxel (comme une brique Minecraft), pour définir un obstacle et aider le robot à déterminer un couloir de vol sûr.
Cela ajoute une plus grande robustesse à l’autonomie de Nexys car ce pipeline d’occupation fonctionne à des milliers de fois par seconde pour déterminer chaque classification des voxels. Cela aide à éliminer les erreurs d’agrément parasites de la poussière qui peuvent faire en sorte qu’un robot se retrouve en place.
Tout en testant ce filtre sur le terrain et avec les clients d’Exyn, ils ont vu les opérateurs de plus en plus confiants d’envoyer Nexys sur des missions plus profondément dans les cavités souterraines bien au-delà de la ligne de vue visuelle avec ce filtrage avancé de poussière en sachant que le robot reviendrait en toute sécurité. Ce niveau de confiance dans les robots autonomes dans des environnements robustes contribuera à stimuler davantage l’adoption une fois que les professionnels de l’arpentage auront subi la fiabilité et la robustesse de première main.

Expérience de l’autonomie Niveau 4B
Donc, si vous êtes fatigué que la poussière détermine ce qui fonctionne et ce qui ne fonctionne pas sur votre chantier, le nouveau filtrage avancé inclus dans Nexys Autonomy pourrait être la solution que vous attendiez.
Contactez-nous aujourd’hui à En savoir plus sur le Nexys écosystème de cartographie portable et d’autonomie modulaire et Réservez une démo personnalisée pour vous-même Et votre équipe.

À propos de Raffi Jabrayan
Raffi Jabrayan est vice-président, vente commerciale et développement commercial d’Exyn Technologies. Il supervise l’expansion de l’entreprise internationale dans les secteurs de l’exploitation minière et de la construction, ainsi que la pénétration dans d’autres industries.
Une grande partie de son rôle chez Exyn est d’aider les mineurs à tirer parti des données produites par les robots aériens autonomes d’Exyn pour rationaliser les inspections souterraines, améliorer l’efficacité opérationnelle et réduire les risques. Avant de rejoindre Exyn, Raffi a géré des projets d’innovation numérique et technologique pour Dundee Precious Metals et a été intimement impliqué dans l’opérationnalisation de nouvelles technologies dans le flux de travail de Dundee. Raffi a supervisé le scoutisme, la diligence raisonnable, la mise en œuvre et l’évaluation post-intégration des projets numériques et technologiques de Dundee.
Raffi est un professionnel minier chevronné ayant une expérience pratique au niveau de l’usine et de l’entreprise à divers titres et a terminé le programme de stratégie commerciale numérique au MIT Sloan ainsi que la création d’impact stratégique de la Columbia Business School.
Sur les technologies exyn
Exyn Technologies est une autonomie robotique multi-plate-forme pionnière pour les environnements complexes et conformes au GPS. Pour la première fois, des industries comme l’exploitation minière, la logistique et la construction peuvent bénéficier d’une solution unique et intégrée pour capturer des données critiques et sensibles au temps d’une manière plus sûre, plus abordable et plus efficace.
Exyn est propulsé par une équipe d’experts en systèmes autonomes, en robotique et en génie industriel, et a attiré le talent du laboratoire de saisie de renommée mondiale de Penn ainsi que d’autres institutions de recherche légendaires. L’entreprise est soutenue par VC et tenue en privé, avec un siège social à Philadelphie.
Pour plus d’informations, veuillez visiter www.exyn.comtu peux aussi Contactez-nous sur notre site Web.